倒车雷达系统
系统描述
无ECU 倒车雷达系统使用其中一个传感器来完成 ECU 的功能, 并且只能更改蜂鸣器的持续时间。蜂鸣器的音调不能改变。
倒车雷达系统 是一种通过使用超声波传输来操作的驻车辅助系统。其目的是协助驾驶员进行停车操作。该系统不是设计为防撞系统,也不是视觉解释的替代品。集成在后保险杠中的三个超声波传感器定义了车辆后部的检测区域。超声波驻车辅助非ECU 控制整个系统,RML 是控制RPAS 系统工作逻辑的 主传感器。与LIN 系统相比成本较低。 倒车雷达系统识别检测区域中的障碍物的时间并确定其与车辆的距离。RPAS 通过发出声音来报告距离最近障碍物的距离。音调的重复率与障碍物和车辆之间的距离成正比。因此,当车辆靠近障碍物时,音调的重复率会增加。如果障碍物达到预定的最小距离,RPAS 将发出连续不间断的音调。

系统电路图
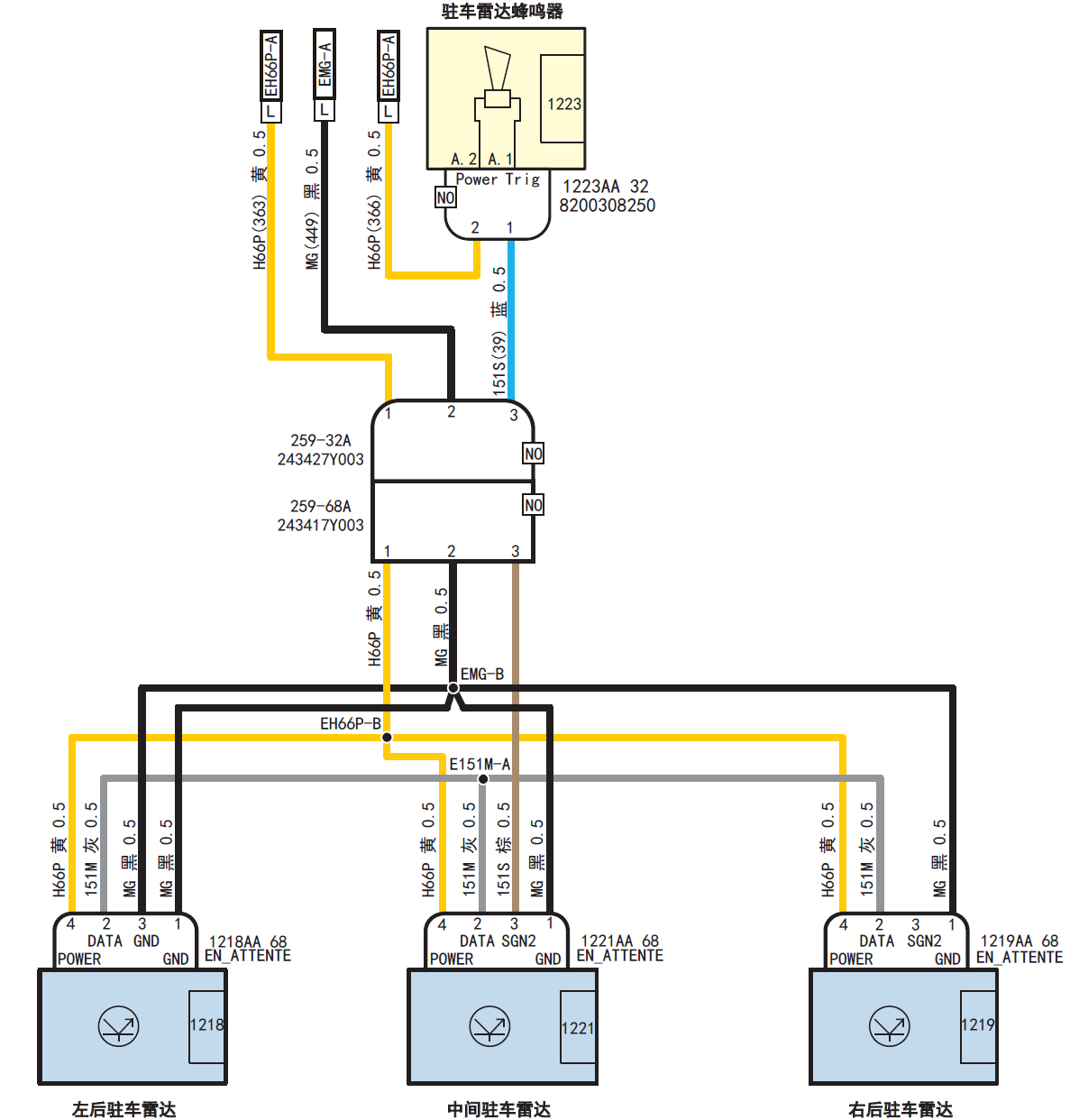
传感器插头针脚定义

系统的功能
激活蜂鸣声
为提示驾驶员倒车雷达系统进入工作,挂上倒车档时会发出0.5 秒的启动蜂鸣音。
检测蜂鸣声
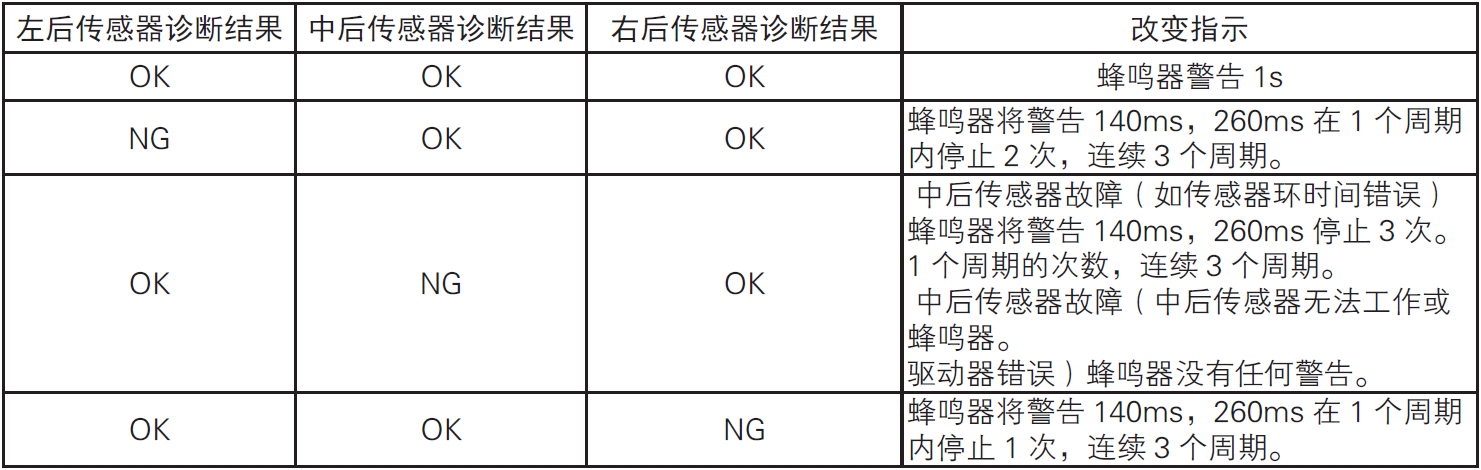
当在倒车雷达系统的视野中检测到障碍物时,系统会发出检测蜂鸣声警告驾驶员,其特征如下:

自诊断功能
倒车雷达系统进入系统具有自诊断服务,它自检传感器的功能。 自诊断服务在挂入倒车档时启动,当倒车雷达系统通电时,将首次进行自诊断。 如果自诊断为NG,蜂鸣器将改变指示不同的声音。
注意!
如蜂鸣器不响应,首先更换蜂鸣器,如果仍然不响应,则需要更换后中传感器
倒车雷达系统自诊断后,如果诊断结果正常,倒车雷达系统系统可以正常工作。如果检测到不正常,在自我诊断恢复正常之前,倒车雷达系统将不工作。 倒车雷达系统正常工作时,每500ms 进行一次自诊断,如果自诊断为不正常,则停止检测障碍物的报警,如上述开机自诊断等报警。 当检测到故障时,倒车雷达系统进入系统进入故障模式。
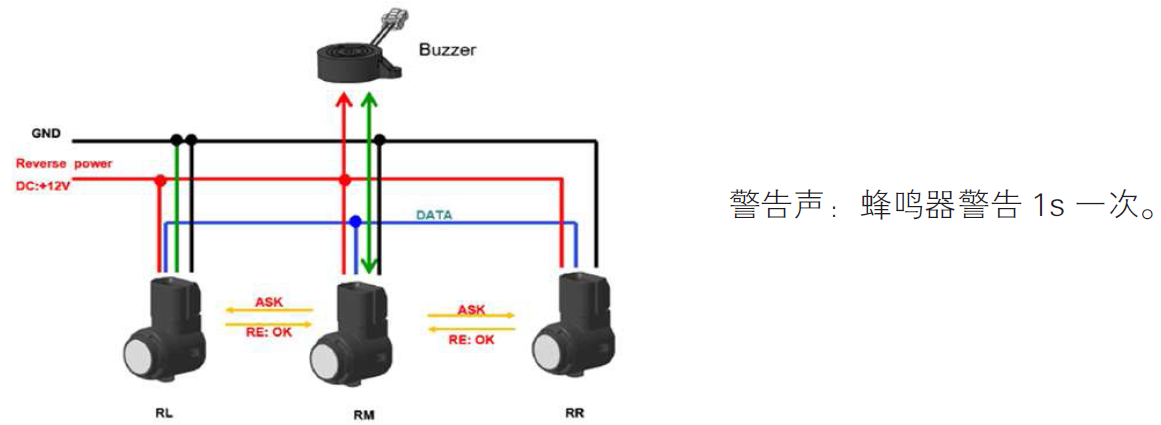
注: 当倒车雷达系统 通电后,它将自我诊断一次。主传感器将与从传感器通信。当所有从传感器回复确定到主传感器时。PAS 自我诊断正常。否则,PAS 自我诊断是 NG。如果诊断结果正常。PAS 可以正常工作。 如果没有,在自我诊断恢复正常之前,PAS 不会工作, 也不会加热。 如果发生故障。这意味着一些传感器坏了。因此维修人员可以通过诊断警告声音来判断哪个传感器坏了,并更换坏传感器。
自我诊断正常
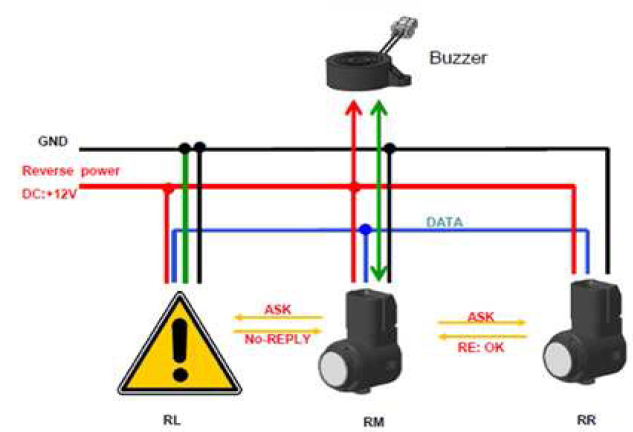
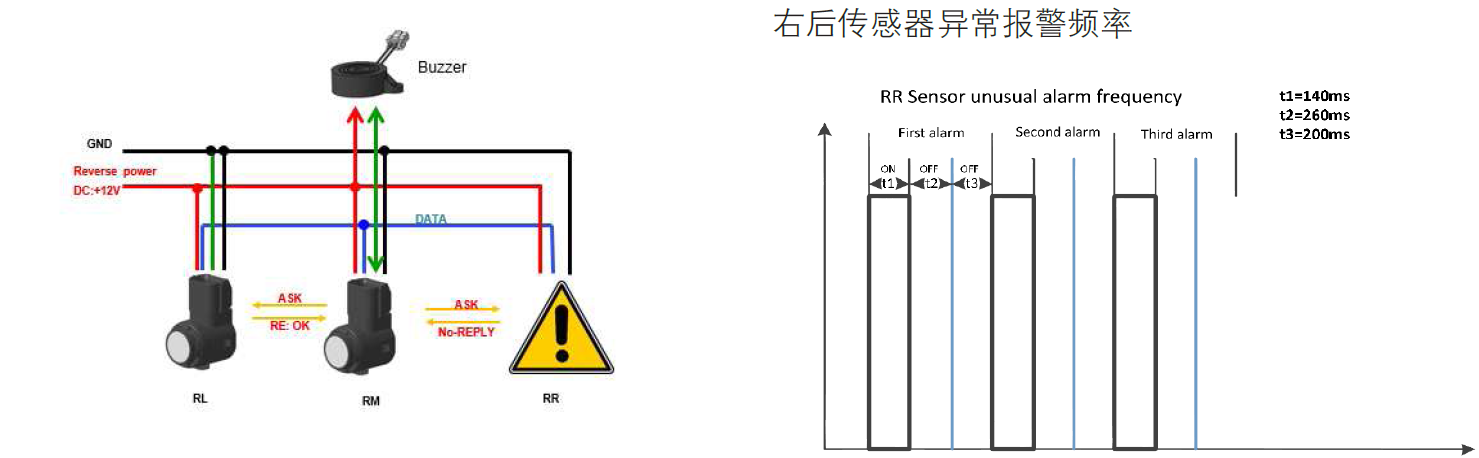
右后传感器故障
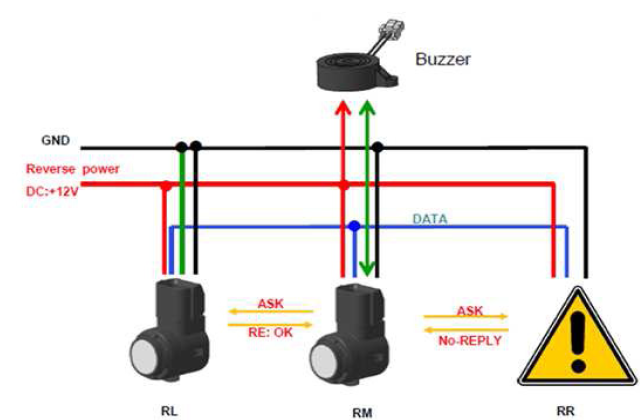
警告声:蜂鸣器将警告140ms,260ms 在1 个周期内停止1 次,连续3 个周期。(因为右后传感器的故障优先级高于左后传感器)
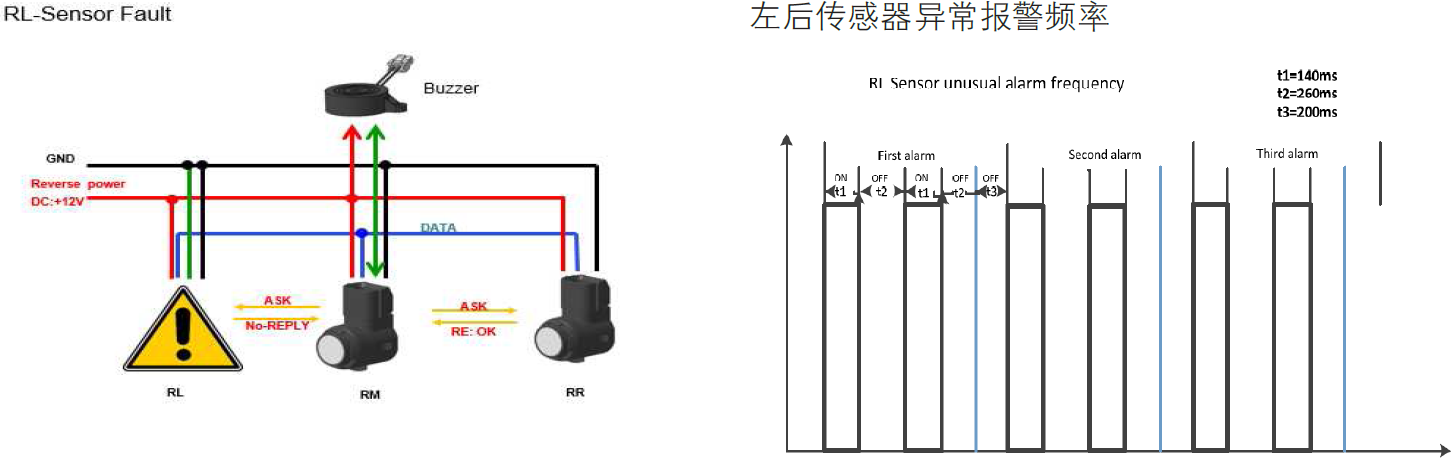
左后传感器故障
警告声:蜂鸣器将警告140ms,260ms 在1 个周期内停止2 次,连续3 个周期。
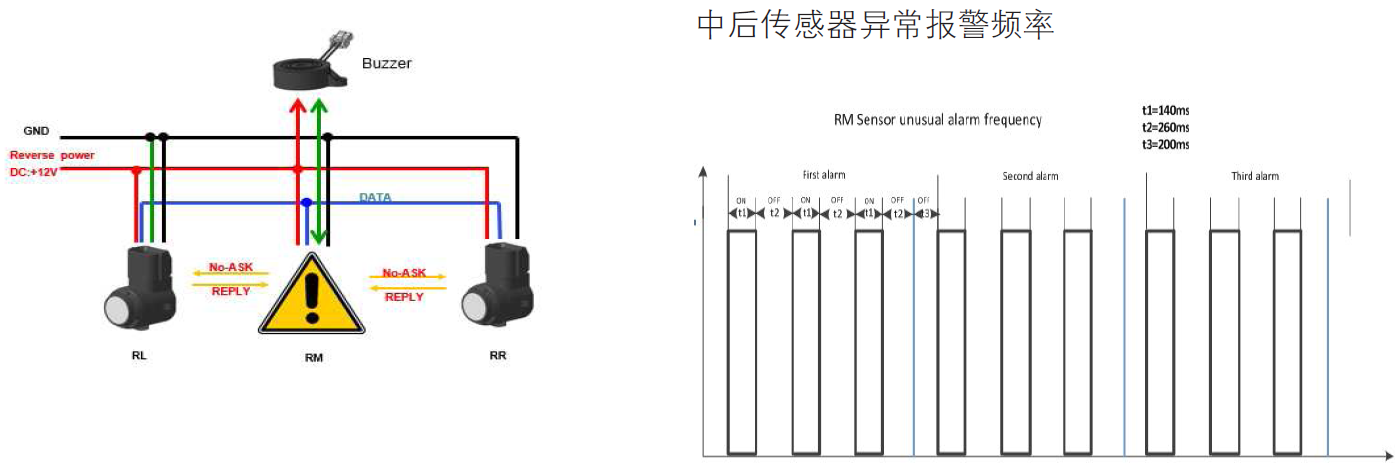
中后传感器故障
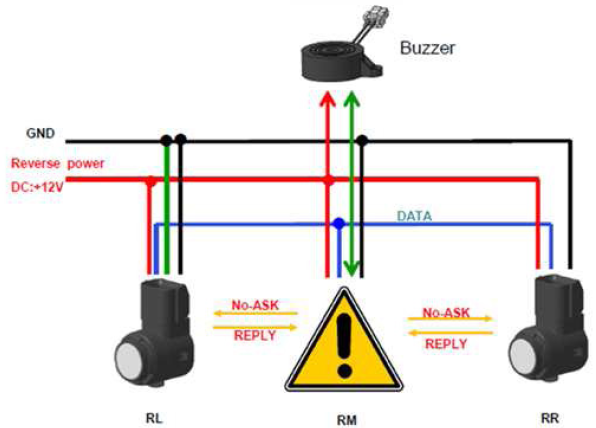
中后传感器通信错误(或蜂鸣器故障) 警告声: 由于中后传感器是主传感器,因此没有警告,它控制蜂鸣器。中后传感器环故障: 警告声:蜂鸣器将警告140ms,260ms 在1 个周期内停止1 次,连续3 个周期。
左后传感器和右后传感器均存在故障
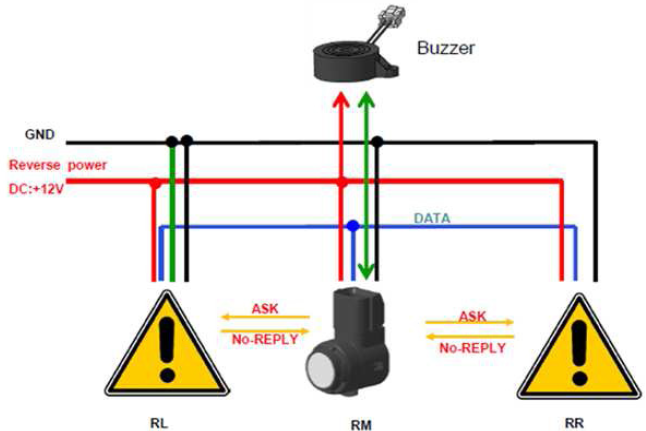
警告声:蜂鸣器将警告140ms,260ms 在1 个周期内停止1 次,连续3 个周期。(因为右后传感器的故障优先级高于左后传感器)
故障模式/ 错误提示/LED 反馈
在故障模式下,当驾驶员启动倒车档时,系统会发出三次循环的滴滴声,驾驶员可以根据每个循环音的次数来判断故障方向
诊断模式
根据RPAS 输入系统组件故障发出蜂鸣器编码警报。
提示
如果同时发生两个或多个传感器故障,则诊断模式只会引发一个。按此顺序:(右后,左后,中后)
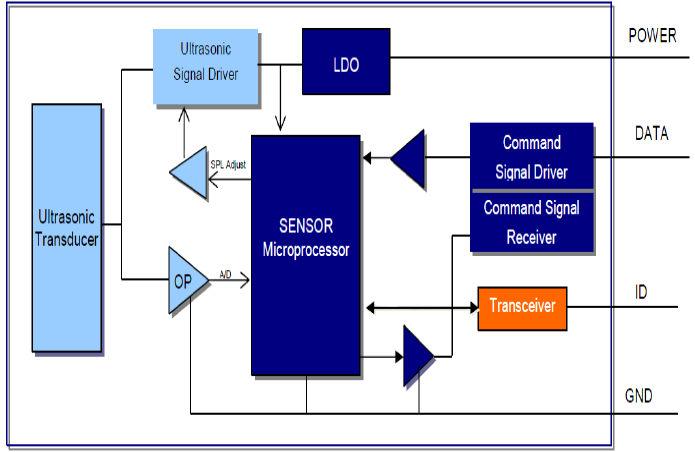
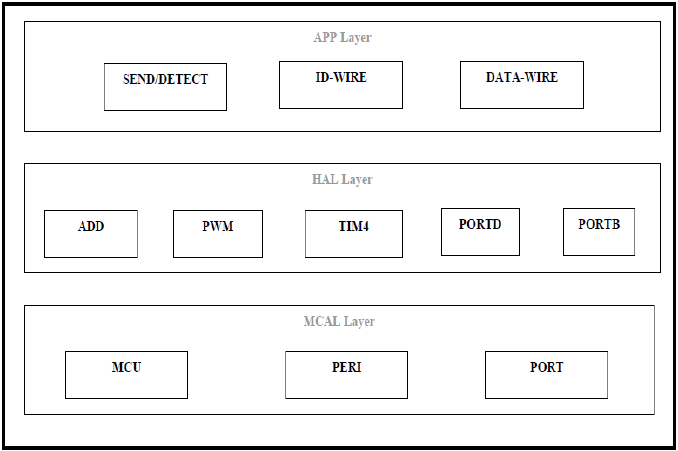
硬件/ 软件系统结构
中后传感器是控制RPAS 工作逻辑的主传感器。
硬件:
软件:
系统正常运行的前提条件
1 . 倒车档打开。 2 . 未检测到故障,RPAS 入口发出激活蜂鸣音
2.1 默认状态
只有一个状态,RPAS 进入系统被激活。
配置程序
倒车雷达系统从倒车灯供电,因此当挂上倒车档时,系统将开始工作。
用户注意事项/ 风险
为确保倒车雷达系统功能正常,请保证传感器表面的清洁度。
系统故障及诊断方法
当倒车雷达系统遇到一个或多个电气故障时,它将不再工作。它进入故障模式,向用户/ 维修人员显示故障状态警告,当挂上倒车档时,发出错误的报警声。
传感器部件说明
排除部件故障
重要事项:如果同时发生多个部件故障,诊断模式将根据以下顺序仅引发一个部件故障:传感器(右后、左后和中后)。(注:当多个传感器出现故障时,首先会以最高优先级报警探头,因此只需用报警音替换相应的探头即)
右后传感器不工作
进入诊断模式并验证传感器是否出现故障。如果右后传感器发生故障, 则提供以下信息:
当右后传感器故障时。维修人员将听到右后传感器故障的错误蜂鸣音。
注意!
右后传感器故障优先级最高,故障优先级为(右后 左后和中后)传感器故障的错误蜂鸣音。
左后传感器不工作
进入诊断模式并验证传感器是否出现故障。如果左后传感器发生故障, 则提供以下信息:
当左后传感器故障时。维修人员将听到左后传感器故障的错误蜂鸣音。
注意!
RL 传感器故障优先级为第二,故障优先级为(右后 左后和中后)
中后传感器不工作
进入诊断模式,确认传感器是否有故障。如果中后传感器内部故障(如环路时间故障),则提供以下信息:
警告的声音:
- 没有警告。因为后中传感器是主传感器,它控制蜂鸣器。
- 如果只是铃声错误,而不是通信错误,它可以警告错误发出滴滴声。
当中后传感器内部出现故障(如响铃次数故障)时,后中可以驱动蜂鸣器,警告驾驶员会听到中后传感器发出的故障蜂鸣音。
中后传感器内部故障(如环次故障)优先级最低,故障优先级为(右后 左后和后中)
维修前操作
RPA 从倒车灯获取电源,因此在倒车时确保RPA 正常供电。
无按钮或LED 系统的诊断方法
RPAS 组件功能检查:
1)启动钥匙
2)挂倒档
蜂鸣器是否只发出1 次声音1 秒钟?
是:RPA 处于正常状态
注意!
正常情况下,即使车后没有物体也会发出声音。
否:RPA 处于故障状态,转到故障查找程序。
系统故障查找程序
步骤1:检查蜂鸣器及其线束
检查蜂鸣器及其线束 检查是好的吗?
是:转到步骤2 否:再次更换蜂鸣器或其线束,RPAS 部件功能检查。
步骤2:检查三个传感器线束
检查三个传感器接头及其线束(电源、接地和信号)检查是好的吗? 是:转到步骤3 否:重新更换传感器接头或线束,RPAS 部件功能检查。
步骤3:检查后中传感器通信错误
蜂鸣器没有声音上述条件是真的吗? 是:通信失败,再次更换后中传感器,RPAS 部件功能检查。 否:转到步骤4
步骤4:检查右后传感器感应圈时间故障
蜂鸣器发出3 次声音,每次声音之间有一定的时间延迟。上述条件是真的吗? 是:右后失效,再次更换右后传感器,RPAS 部件功能检查。 否:转到步骤5
步骤5:检查左后传感器感应圈时间故障
蜂鸣器发出6 次声音,每次声音之间有一定的时间延迟。上述条件是真的吗? 是:左后失效,再次更换左后传感器,RPAS 部件功能检查。 否:转到步骤6
步骤6:检查后中传感器感应圈时间故障
蜂鸣器发出9 次声音,每次声音之间有一定的时间延迟。上述条件是真的吗? 是:后中失效,再次更换后中传感器,RPAS 部件功能检查。 否:将故障反馈给给高级别的专家。
注意!
RPAS 的故障优先级:后中传感器通信故障——右后传感器故障——左后传感器故障——后中传感器环路时间故障